
Geolocation Devices
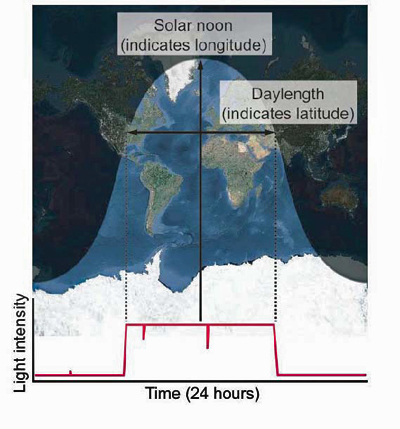 Solar geolocation has been used for centuries by mariners and explorers. The concept is based on the fact that on a given day of the year the length of the day (i.e. the time during which the sun is visible) varies with latitude and the time of solar noon varies with longitude. So if you can measure the length of the day and note the exact time of solar noon, you should be able to determine your general location on the globe.
Solar geolocation has been used for centuries by mariners and explorers. The concept is based on the fact that on a given day of the year the length of the day (i.e. the time during which the sun is visible) varies with latitude and the time of solar noon varies with longitude. So if you can measure the length of the day and note the exact time of solar noon, you should be able to determine your general location on the globe.
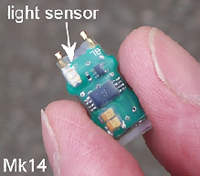
Geolocation dataloggers or "geologgers," take advantage of this simple solar geolocation principle. However, rather than tracking the exact position of the sun, geologgers simply use a light sensor to generate and store light-level data at regular intervals. During twilight periods, a simple series of light measurements can provide a sun position based on the correspondence between light intensity and the angle of the sun. In general, we usually designate a low sun angle as a threshold for determing sunrise and sunset. We can then infer a location based on the length of the day (latitude) and the time of solar noon (longitude) which occurs at the midpoint between sunrise and sunset.
 The same calculations can be applied at night as well, using solar midnight for longitude. At first blush, this method seems like an elegant solution to the problem of how to track small birds. With a minimal electronic circuit and a small battery, you can generate location data over an entire migration cycle, with two data points every day (one for the daylight period and one for nighttime). However, there are many challenges associated with the method, which include recovering tags after they have been deployed, accounting for error caused by environmental factors (e.g. weather and vegetative cover), and (at present) the lack of tools and standards with regard to data analysis or error reporting. Nevertheless, geologgers are the only practical means of tracking small migratory birds over large distances, and there is great interest in these devices among the ornithological community.
The same calculations can be applied at night as well, using solar midnight for longitude. At first blush, this method seems like an elegant solution to the problem of how to track small birds. With a minimal electronic circuit and a small battery, you can generate location data over an entire migration cycle, with two data points every day (one for the daylight period and one for nighttime). However, there are many challenges associated with the method, which include recovering tags after they have been deployed, accounting for error caused by environmental factors (e.g. weather and vegetative cover), and (at present) the lack of tools and standards with regard to data analysis or error reporting. Nevertheless, geologgers are the only practical means of tracking small migratory birds over large distances, and there is great interest in these devices among the ornithological community.
 There are two fronts in the pursuit geologger tracking: hardware and software. On the hardware front lie the challenges of miniaturizing the devices (to minimize their impact and to allow for tracking smaller species), while improving their precision, durability, and operating life. On the software front one encounters a wide variety of approaches to problems such as how to determine a precise time of sunup or sundown from a continuous and variable string of light-level data. The simplest geologger software might simply use a light threshold level to establish sunup and sundown and then apply an algorithm that translates day length and solar noon into discrete data points. More sophisticated analysis methods employ template fitting techniques to determine sunup and sundown, and some have incorporated a Bayesian framework that incorporates known data (e.g. expected behavior, landscape features, and previous locations) into location estimates.
There are two fronts in the pursuit geologger tracking: hardware and software. On the hardware front lie the challenges of miniaturizing the devices (to minimize their impact and to allow for tracking smaller species), while improving their precision, durability, and operating life. On the software front one encounters a wide variety of approaches to problems such as how to determine a precise time of sunup or sundown from a continuous and variable string of light-level data. The simplest geologger software might simply use a light threshold level to establish sunup and sundown and then apply an algorithm that translates day length and solar noon into discrete data points. More sophisticated analysis methods employ template fitting techniques to determine sunup and sundown, and some have incorporated a Bayesian framework that incorporates known data (e.g. expected behavior, landscape features, and previous locations) into location estimates.
